How it works
A layered autonomy stack with amphibious mobility.
Technical detail for each subsystem. Refer to the Docs for deeper design, experiments, and integration notes.
Perception
Thermal and optical sensing layers identify casualty candidates, filter wave clutter, and produce a stabilized target track for recovery.
Localization
Multi-sensor fusion maintains state estimation across GPS dropouts, with drift-aware positioning aligned to ocean current models.

Planning
The mission planner balances time-to-first-contact, energy, and sea state constraints while producing a safe approach corridor.

Control
Adaptive controllers manage thrust, heading, and recovery pod alignment for stable interception and retrieval.

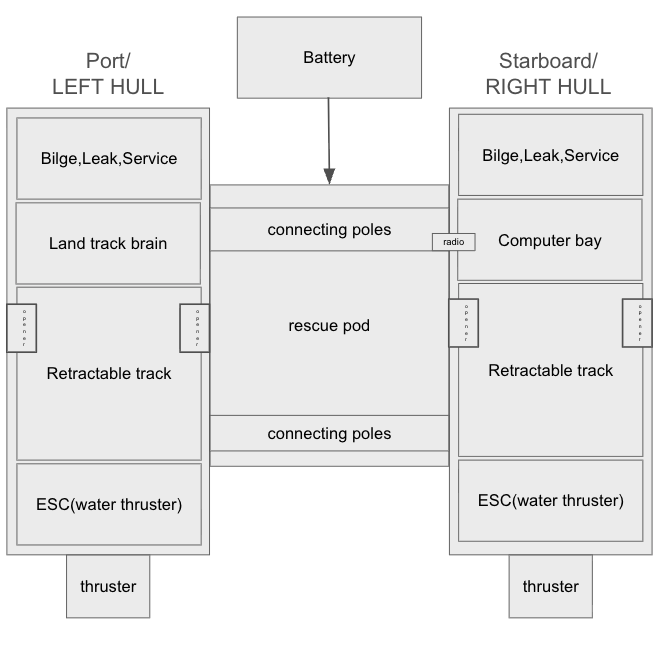
Morphing
The amphibious drivetrain transitions between hull propulsion and tracked locomotion for shore delivery.

Safety
Fail-safes include loiter behaviors, redundant comms, and conservative recovery envelopes to protect both casualty and responders.
